(EN) Schwingungsanalyse für Anfänger 5
25.01.2024
1. Was ist bei der Signalverarbeitung wichtig zu wissen?
2. Was sind die Grundregeln für die Bewertung von Maschinenschwingungen?
Das Signal eines Schwingungssensors liegt in analoger Form vor. Um es in Analysatoren verarbeiten zu können, muss das Signal in eine digitale Form umgewandelt werden. Diese Umwandlung erfolgt durch einen A/D-Wandler.
Wenn das ursprüngliche kontinuierliche Signal Frequenzen enthält, die höher als die Hälfte der Abtastfrequenz sind, wird das Signal durch das als Aliasing bekannte Phänomen verzerrt.
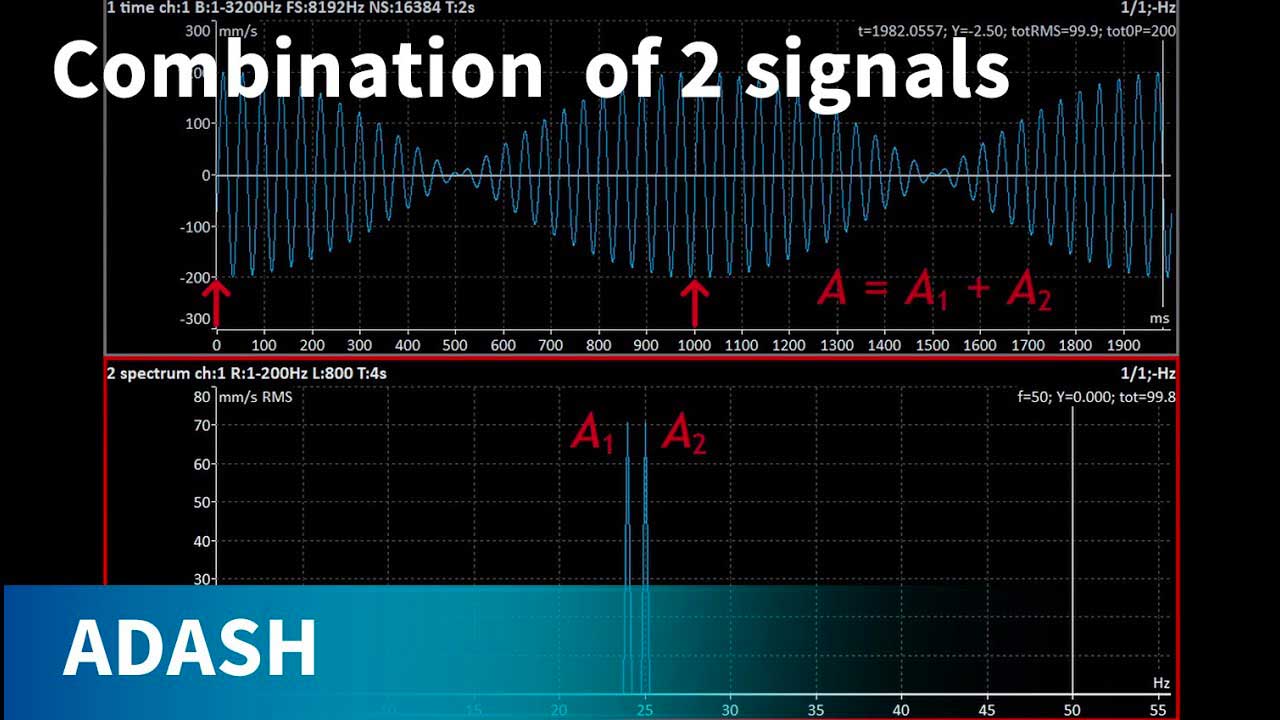
Jetzt haben wir ein digitales Signal im Schwingungsanalysator und können damit arbeiten. Wir können es beispielsweise in seiner Zeitbereichsform anzeigen – der Zeitwellenform. Eine informativere Darstellung ist jedoch die Frequenzbereichsform. Wie im vorherigen Video gezeigt, zeigt das Spektrum die Frequenzen, aus denen das Schwingungssignal besteht. Zur Berechnung des Spektrums verwenden wir die schnelle Fourier-Transformation (FFT).
Die FFT hat eine Einschränkung: Alle Signalkomponenten müssen periodisch sein.
Wir beobachten, dass bei einem nicht periodischen Signal Energie in mehrere Spektrallinien nahe der tatsächlichen Frequenz „entweicht“ oder „ausläuft“, wodurch sich das Spektrum über mehrere Linien ausbreitet – dieses Phänomen wird als Leckage bezeichnet. Um dies zu mildern, wird ein Trick angewendet: Das Signal wird mithilfe von Fenstern künstlich zusammengefügt, wodurch es periodisch wird.
Die Schwingungsanalyse kann grob in zwei Kategorien unterteilt werden: Analyse mechanischer Maschinenfehler und Lageranalyse. Zu den grundlegenden mechanischen Maschinenfehlern gehören Unwucht, Fehlausrichtung und mechanische Lockerheit. Wir können diese Fehler bei niedrigen Frequenzen (10 – 1000 Hz) erkennen. Schwingungsmessungen werden in Geschwindigkeit (mm/s) gemessen. Wenn die Geschwindigkeitswerte hoch sind, kann eine Untersuchung des Spektrums hilfreich sein. Wenn das Spektrum eine einzelne hohe Linie bei der Drehzahlfrequenz zeigt, liegt der Fehler in einer Unwucht. Wenn es beispielsweise nur eine hohe Linie bei 25 Hz gibt, ergibt die Berechnung von 25 x 60 1500 U/min. Wenn die Geschwindigkeit tatsächlich 1500 U/min beträgt, liegt der Fehler in einer Unwucht.
Eine Unwucht kann mechanischer Natur sein und muss ausgewuchtet werden, oder elektrischer Natur (bei Motoren). Um sie zu unterscheiden, beobachten Sie den Geschwindigkeitswert bei ausgeschaltetem Motor. Wenn der Geschwindigkeitswert mit abnehmender Geschwindigkeit abnimmt, liegt der Fehler in einer mechanischen Unwucht. Ein schneller Abfall auf fast Null (Stromausfall) weist auf einen elektrischen Fehler hin. Wenn die Geschwindigkeitslinie und ihre Vielfachen (Harmonischen) im Spektrum vorhanden sind, liegt der Fehler in Lockerheit oder Fehlausrichtung. Axialgeschwindigkeitswerte, die deutlich niedriger sind als die radialen Werte (z. B. weniger als 30 % des radialen Wertes), deuten auf Lockerheit hin. In diesem Fall sollten Messungen an allen Maschinenfüßen vorgenommen werden. Dies kann ohne Pads erfolgen, da Geschwindigkeitsmessungen bei niedrigen Frequenzen weniger empfindlich sind als Beschleunigungsmessungen bei hohen Frequenzen. Suchen Sie den Fuß mit dem höchsten Wert; er weist wahrscheinlich auf den Lockerheitsfehler hin. Dies liegt oft an einem gebrochenen Ankerbolzen. Wenn der axiale Geschwindigkeitswert ähnlich oder höher als der radiale Wert ist, liegt der Fehler in einer Fehlausrichtung, die eine Ausrichtung erfordert. Ein einzigartiger Fehlertyp ist Resonanz, die als Unwucht mit einer einzigen Geschwindigkeitslinie im Spektrum nachgeahmt wird. Das Auswuchten hat nur minimale Auswirkungen, da das eigentliche Problem die Eigenfrequenz des Maschinenfundaments in der Nähe der Geschwindigkeitsfrequenz ist. Um dies zu ermitteln, messen Sie die Geschwindigkeit am Fundament. Wenn die Werte an den Enden niedrig und in der Mitte hoch sind, liegt das Problem in Resonanz. Normalerweise ist eine Verstärkung des Fundaments erforderlich – dies ändert die Eigenfrequenz. Der andere Aspekt der Schwingungsanalyse ist die Lageranalyse. Lagerfehler treten im Hochfrequenzbereich (500 Hz bis 16 kHz) auf und werden durch die Lagerschwingungen – einen Ton – dargestellt, die durch Kugelstöße verursacht werden. Die Beschleunigung (g) wird zur Messung der Schwingung verwendet. Eine Zunahme der Schwingungen im Hochfrequenzspektrum weist auf einen sich verschlechternden Lagerzustand hin. Die Lageranalyse konzentriert sich auf die Fehlerfrequenzen, die spezifisch für Lager sind. Was ist eine Lagerfehlerfrequenz? Stellen Sie sich eine Lochfraßkorrosion am Außenring vor. Jede Kugel, die auf die Lochfraßkorrosion trifft, verursacht einen Schwingungsschock (den Ton). Wenn der Außenring einen Riss aufweist, berechnen wir das Zeitintervall (T) zwischen den Stößen anhand der Drehzahlfrequenz und der Kugelanzahl. Dieses Zeitintervall definiert die Wiederholungsfrequenz der Stöße – die Fehlerfrequenz. In diesem Beispiel ist es die Fehlerfrequenz des Außenrings.
Lagerfehlerfrequenzen erscheinen jedoch nicht im Spektrum des Lagers; nur die Schwingungsfrequenz des Kugelaufpralls (Lagerton) ist erkennbar. Ein solcher Kugelaufprall ist im Zeitbereich sichtbar:
Zur Identifizierung von Fehlerfrequenzen wird eine Signaldemodulation verwendet.